
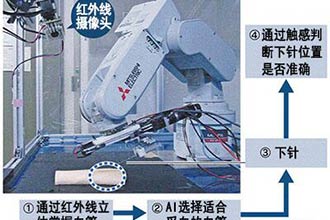
日本弘前大学的医工合作组织医用系统创造开拓组织的研究团队开发出采血机器人。该机器人利用红外线摄像头掌握血管的形状和位置,寻找适合采血的位置,然后将装在机器人上的针头插入血管。研究团队使用模拟人类手臂的模型进行测试,机器人能够准确将针头插入血管。该团队计划对机器人进行改良,实现根据针头的触感判断是否正确下针,力争3年后通过动物实验来测试效果。
在医院看病和体检时,经常要通过抽血调查症状和健康状态。虽然抽血的静脉较粗,但是由于静脉位于皮肤之下,不好辨认,正确将针扎入血管并非易事,有时候无法一次成功。目前日本人手短缺、想当护士的年轻人减少,如果能够实现自动采血,将减轻护士的工作负担。
研究团队力争最终让人工智能(AI)掌握护士等医护人员的熟练技术,推出能够自动采血的机器人。
该团队开发的机器人带有两个红外线摄像头,能够结合来自两个方向的红外线图像,立体掌握血管的形状、位置和粗细等。可在1秒内测定几十次,即使采血时活动手腕,也能找准下针的位置。
为了模仿学习经验丰富的护士的技术,在约10个人的大拇指上装上触觉传感器,然后让护士采血,测定护士下针以及为防止损伤血管内壁而把针头向内推的动作。
今后,团队计划收集更多数据让AI学习,从而提高准确度。护士如何选择容易采血的血管也成为AI学习的数据。
之后将学习了数据的AI装入机器人的控制系统,实现自动采血。如果动物实验进展顺利,计划5年后用于人类,力争实现临床应用。
免责声明:本文由用户投稿,(图文、音视频)均由用户自行上传分享,文章内容不代表本站立场,本站不对其内容的真实性、完整性、准确性给予任何担保、暗示和承诺,仅供读者参考,文章版权归原作者所有。若您的权利被侵害,请联系本站在线客服进行删除。